码垛用视觉传感器的使用方法
优化你的码垛和去码垛工作需要仔细的计划-甚至可能一些俄罗斯方块技能。所有不同形状和大小的盒子堆叠在一起,这使得创建理想的布局成为一项挑战。 
使用SICK Visionary-T传感器优化堆垛
托盘在大多数(如果不是全部)供应链运作中被使用,以有效地将多个货物从一个位置移动到另一个位置。然而,并不是每个人都同意*的码垛方式;有些采用人工码垛方式,而另一些采用机器人或自动化方式。
不管你的码垛策略如何,任何供应链运作的目标都是尽可能多地出货。这只能通过充分利用每个单独托盘上的空间来实现,即使这意味着每个托盘只需要多包装一个。
SICK提供了一个优化您的堆垛和去堆垛方法的解决方案,因此您将看到吞吐量的增加而不会增加运费。Visionary-T是一个3D视觉传感器,它提供托盘的快照,这样您就可以看到是否有不完整的层、未对齐的对象,或者验证托盘是否在正确的位置。有了Visionary-T,您将在短时间内优化您的托盘化工作。

SICK 3D视觉传感器Visionary-T 静态三维数据优化托盘化
当摄像机安装在托盘上方时,您将看到鸟瞰图,以检查是否有任何开口,或者托盘是否装满并准备装载到卡车上。Visionary-T提供您验证托盘是否有空间,然后可以将机器人引导到放置盒子的确切位置。
过去的解决方案要求在输送机或机器人上安装摄像头,这增加了传感器损坏的可能性。但Visionary-T可以直接安装在托盘上方,并保持静止。它也占用较少的空间,更容易配置时,它安装在托盘上。因为您正在接收托盘的静态图像,所以不需要安装编码器或安全传感器之类的附加传感器来监视移动。
一旦你知道你的货盘上是否有开口,你就可以通过准确地知道哪里有开口来放置更多的货物,从而进行更精确的拣选和放置操作。然后,您可以根据3D快照告诉robot应该将包准确地放置在何处。这节省了你的时间和金钱,因为你不再需要机器人从上到下扫描,直到找到一个开口。 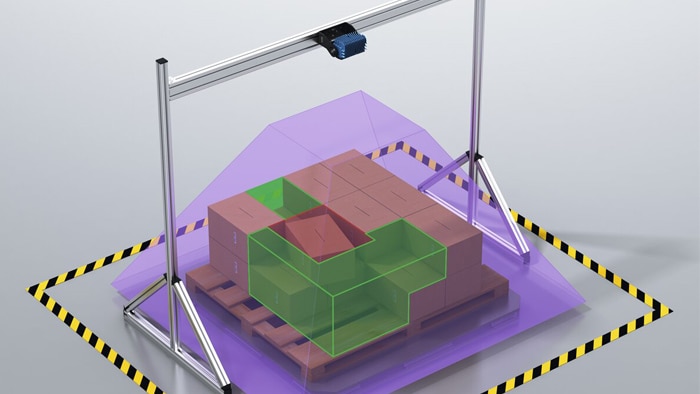
用Visionary-T进行负载优化和验证 负载优化和验证
如前所述,供应链运营部门希望尽可能多地将货物装载到货盘上,以便在不增加运费的情况下每天取出更多的货物。Visionary-T通过充分利用现有的托盘空间,帮助供应链运作更智能地进行托盘化。托盘的建造和拆箱速度更快,从而提高了吞吐量和降低了成本。
除了更快地装载和拆下托盘外,您还可以使用Visionary-T来检测托盘的可用性。3D摄像机能够检测是否没有可用的托盘,托盘是否存在但为空,是否有多个托盘堆叠在一起,甚至托盘的方向。这意味着你将花更少的时间在地板上验证这些小细节。 SICK的Visionary-T 3D视觉传感器为您的物流操作提供了优化托盘化/去托盘化的解决方案,无需俄罗斯方块体验。 |


 在线交流
在线交流 咨询电话
咨询电话